| ◀ korábbi verseny: RAMI 2022 |
A RAMI 2023 autonóm vízalatti robot verseny
Megnyerte a teleoperációs versenyszámot , valamint különdíjat kapott 2023. nyarán az Óbudai Egyetem „OUBOT” csapata a NATO CMRE által szervezett RAMI 2023 autonóm tengeralattjáró versenyén, ahol a feladat egy szimulált tengeri gáz- és olajipari telephely megvizsgálása volt, miután az üzembiztonsági rendszerek üzemzavart jelentettek.
Csatlakozz!
A következő versenyekre már elkezdtük a felkészülést, és az OUBOT csapatba szeretettel várjuk mind hallgatók, mind pedig oktatók, illetve pártoló tagok jelentkezését. Különösen olyanoknak ajánljuk ezt a területet, akik szeretnek valós gyakorlati problémákkal foglalkozni, valamint szeretnek új és izgalmas ismereteket szerezni a robotika, gépi tanulás, szenzorok, képfeldolgozás, szoftver és hardver fejlesztés területeken.
A RAMI 2023 verseny
A verseny az olaszországi La Spezia város mellett került megrendezésre 2023 július 16 ‒ 21. között. A verseny célja a csapatok által összerakott AUV-k (Autonomous Underwater Vehicles) képességeinek objektív vizsgálata és megmérettetése előre meghatározott versenyfeladatok segítségével. A tavalyi RAMI 2022, illetve a korábbi ERL vízalatti autonóm robot versenyekhez hasonlóan itt is volt egy háttértörténet, mely keretet biztosított a verseny számára. Ebben az évben a háttértörténet az alábbi volt:
„Egy tengeri gáz- és olajipari telephelyet meg kell vizsgálni, miután az üzembiztonsági rendszerek üzemzavart jelentettek. Az eddigiek alapján egy csővezeték szivárogni kezdett, és hamarosan robbanás következhet be. Egy víz alatti robotokból (AUV) álló robotcsapat készen áll a beavatkozásra.
Itt az ideje, hogy a vészhelyzeti csapat cselekedjen. A prioritások a következők a baleset helyszínének elérése, valamint a balesetet szenvedett személyek mennyiségének felmérése és a szivárgás mértékének számszerűsítése. Ezután a robotoknak el kell jutniuk a csőszerelvény területére, hogy az üzemben keletkezett károk felmérése és annak megállapítása megtörténhessen; hogy melyik csőnél van sérülés meg, azaz melyik cső felelős a szivárgásért. Végül a robotoknak be kell avatkozniuk magába az erőműbe a vízalatti szelepek lezárásával a szivárgás megszüntetése érdekében, hogy megakadályozzák a robbanást és a további károkat.”
Idén a tavalyihoz képest egy kezdő francia és egy török csapattal egészült ki a verseny. A tavalyi német bajnok csapat viszont sajnos nem tudott eljönni. A csapatok felkészültségén látszódott, hogy kik foglalkoznak vízalatti robotok irányításával napi szinten. Az olasz csapatok nagyon komolyan megépített eszközöket hoztak a versenyre. Az idei versenyre a tavalyinál komolyabb felkészülést végeztünk. A csapat, ami eddig elsősorban EKIK és NIK kollégákból, hallgatókból épült fel, kiegészült KVK-s segítőkkel (ezúton is köszönet Molnár dékánúrnak a támogatásért), valamint az Argentín UNL egyetem két diákjával (Gonzaloval /PhD/ és Diegoval /MSc/). A tavalyi műanyag csőrendszerhez képest idén nyomásálló alumíniumból készült a tengeralattjáró felépítménye, valamint jelentősen megváltoztattuk az energiaellátó rendszert és a szoftver infrastruktúrát. A tavaly beszerzett szenzorok egy kis részét újra felhasználtuk, úgyhogy így is komoly költségeket jelentett az építés.
Felkészülés
Kitűzött és megvalósított feladatok
-
A korábbi évben megvalósított autonóm vízalatti robot újragondolása és újraépítése.
-
A legfőbb két fejlesztés a külső váz (újratervezése és kialakítása fémből), illetve a belső energiaellátási rendszer (újratervezése és megvalósítása) volt.
-
Az AUV energiaellátási kapacitását jelentősen tovább kellett növelni a hosszabb (több órás) működési idők támogatásához.
-
Az AUV kamera rendszeréből származó adatok feldolgozásához újabb algoritmusokat kellett tervezni és implementálni. A valós idejű képfeldolgozáshoz neurális hálók, illetve komolyabb számolási infrastruktúra került beépítésre.
-
A tavalyi vízalatti manipulátor (gripper) sajnos megadta magát, úgyhogy idén költséghatékonyabb megoldást fejlesztettünk az AUV-hez, hogy a vízalatti feladatokat végre tudjuk hajtani.
-
Az AUV –ban működő DVL-t, integráltuk az AUV belsejében működő robot operációs rendszerrel (ROS-sal) is, ennek segítségével lehetőség van a pontos vízalatti navigációra (mivel a víz alatti sajnos nincs GPS jel).
-
Az AUV szonár eszközt is integráltuk a ROS-ba, melynek segítségével képes érzékelni a körülötte lévő tárgyakat.
-
Az AUV belső működési biztonságáért felelős szoftver réteget teljesen átírtuk.
-
A vészhelyzeti működést újradefiniáltuk (safety, lámparendszer vezérlés, vízérzékelő szenzorok az AUV belsejében, stb.).
-
Az AUV biztonsági mágneses indítórendszere tavaly jól bevált, úgyhogy ezt csak integrálnunk kellett az új rendszerbe, ezt teszi lehetővé vészhelyzetben az AUV azonnali áramtalanítását.
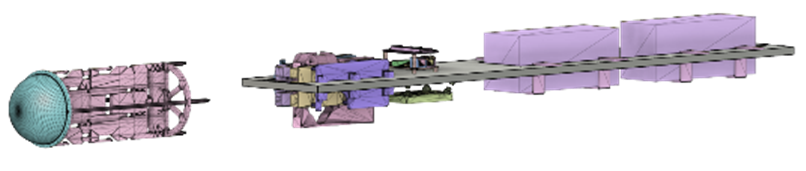
A megvalósított autonóm vízalatti robot (AUV)
A tavalyi RAMI 2022 verseny tapasztalataiból építkezve terveztük és valósítottuk meg az idei RAMI 2023 versenyre készített autonóm vízalatti robotunkat.

A felkészülés
Idén több idő jutott az itthoni tesztelésre, amihez először az egyetem területén kialakított medencét tudtuk használni. (Ezúton is köszönet érte Rektor úrnak, Bús Andrásnak és minden támogatónknak emiatt). Később bányatavakban próbáltuk ki az új vízalatti járművet.
 |
 |
 |
Fotók a versenyről
A versenyt a NATO CMRE (NATO STO Centre for Maritime Research and Experimentation) rendezte és a La Spezia kikötő speciálisan ellenőrzött, teljesen elzárt védett kikötőjének területén folyt, emiatt csak igen szigorú szabályok mellett lehetett a verseny területén mozogni, valamint fényképeket készíteni.
 |
 |
 |
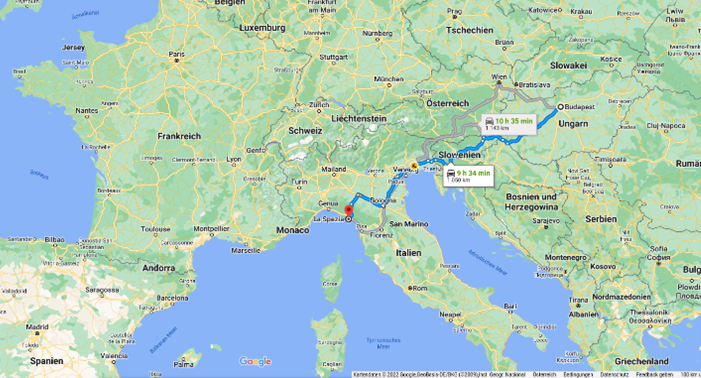
Az utazás
A verseny helyszíne kocsival meglehetősen messze volt Budapesttől. Idén az egyetemi kisbusszal tudtunk kijutni a verseny helyszínére. La Spezia egy tengerparti város Olaszországban és közel 10 órás folyamatos autózással lehet csak elérni. A versenyre idén is éjszaka indultunk, ezért szerencsére a komolyabb, híresen hosszú közlekedési dugókat az autópályákon sikerült elkerülnünk. A bepakolás idén nagyon gyors volt, mivel az idei AUV könnyen szállítható és majdnem egy méterrel kisebb mint a tavalyi verzió.
Visszafelé késő délután indultunk és a fárasztó út után kora hajnalra értünk vissza az egyetemre.
Szállás és étkezés
A szállásunkkal idén is nagyon szerencsések voltunk. A városka melletti hegyen laktunk lélegzetelállító panorámával! (Ez nem csak képletesen szólva igaz, hiszen a lélegzetünk akkor is elállt, amikor egyik este a közeli pizzériától gyalogosan kellett hazajutni). A szobáink nagyok és kényelmesek voltak és legfőképpen éjszakánként volt lehetőségünk a másnapi versenyre az egyes részegységek szoftver és hardver elemeit „bütykölni”. Az olasz konyha híresen finom, és ezt idén is a helyi éttermek pizza kollekcióinak alapos tesztelésével próbáltuk igazolni…

Életképek a csapatról
A közel egy hét alatt a csapat idén is jól összehangolódott. Sokat nevettünk, de a tavalyihoz képest csak kisebb fejlesztői sprintekre volt szükség, úgyhogy több időnk jutott egymás ugratására.
 |
 |
Eredmények
A RAMI 2023 versenyen az OUBot csapat két díjjal, illetve számos tárgynyereménnyel tért haza. Csapatunk elnyerte a legtöbbet fejlődött csapat különdíját, illetve a második versenynapon rendezett TBM2 versenyszám megnyeréséért is díjat kaptunk. (A TBM2 esetén a feladat egy vízalatti csőrendszer felderítése volt, valamint azon különféle manipulációk végrehajtása. A TBM2 versenyszám esetén a feladat végrehajtható volt önvezető, illetve teleoperáció használatával is.)
 |
 |
A kapott elismerések mellett ugyanilyen fontos eredmény volt a csapatban együttműködés, és az éles, időkritikus helyzetben szerzett gyakorlati tapasztalatok megszerzése is.

Tervek a jövőre nézve
Közeljövő – 2023 ősz
A következő megmérettetés az ősszel (októberben) megrendezésre kerülő virtuális RAMI 2023 verseny lesz, melynek során virtualizált szimulációs környezetben kell feladatokat teljesíteni az egyes csapatoknak. Ezen a versenyen is szeretne az OUBOT csapat részt venni, és keresünk a csapatba olyan vállalkozó kedvű elsősorban informatikus hallgatókat, akik a robotika, gépi látás, irányítástechnika, navigáció területén szeretnének izgalmas és gyakorlatorientált szoftveres feladatokat megoldani.
A SAMI 2024 konferenciára, valamint egy folyóiratba cikkeket készítünk az általunk fejlesztett AUV különböző hardver és szoftver problémáihoz megvalósított megoldásainkról.
Távolabbi jövő – 2024 nyár
A következő RAMI verseny várhatólag jövő nyáron kerül megrendezésre Olaszországban. Ez megint valódi autonóm vízalatti tengeralattjáró robotokkal történő versenyzést jelent majd. A jelenlegi rendszerünket szeretnénk ehhez tovább fejleszteni, mind szoftver, mind pedig hardver oldalon. Az elmúlt éveknek megfelelően mindkét versenyen a BSc-s és MSc-s hallgatók a szakmai gyakorlatuk keretén belül is tudnak a felkészülésben segíteni, valamint részt venni.
Köszönetnyilvánítás
Mint minden jó dolognak és eredménynek, ennek is a csapatmunka volt az igazi alapja. Támogatóink nélkül ez a verseny nem lett volna megvalósítható. Az OUBOT csapat tagjai ezúton is köszönik az egyetemi támogatást, valamint az IKUT Alapítvány anyagi támogatását. A csapat köszöni a NATO STO CMRE-nek a felkészülésben és versenyzésben nyújtott sok-sok segítséget. Az egyetemen a felkészülés alatt és az utazások kapcsán is sokszor kellett a hagyományos munkaidőn kívül az épületben tartózkodnunk. Emiatt külön szeretnénk megköszönni az egyetemi portaszolgálat és a karbantartó munkatársak türelmét és folyamatos támogatását is.
| ◀ korábbi verseny: RAMI 2022 |