| ◀ korábbi verseny: ERL 2017 | korábbi verseny: RAMI 2023 ▶ |
A RAMI 2022 autonóm vízalatti robot verseny
Különdíjat kapott és vízalatti szonárt nyert 2022. nyarán az Óbudai Egyetem „OUBOT” csapata a NATO tengeralattjáró versenyén, ahol a feladat egy szimulált tengeri gáz- és olajipari telephely megvizsgálása volt, miután az üzembiztonsági rendszerek üzemzavart jelentettek.
Csatlakozz
A következő versenyekre már elkezdtük a felkészülést, és az OUBOT csapatba szeretettel várjuk mind hallgatók, mind pedig oktatók, illetve pártoló tagok jelentkezését. Különösen olyanoknak ajánljuk ezt a területet, akik szeretnek valós gyakorlati problémákkal foglalkozni, valamint szeretnek új és izgalmas ismereteket szerezni a robotika, gépi tanulás, szenzorok, képfeldolgozás, szoftver és hardver fejlesztés területeken.
A RAMI 2022 verseny
A verseny az olaszországi La Spezia város mellett került megrendezésre 2022 július 10 ‒ 15. között. A verseny célja a csapatok által összerakott AUV-k (Autonomous Underwater Vehicles) képességeinek objektív vizsgálata és megmérettetése előre meghatározott versenyfeladatok segítségével. A korábbi ERL vízalatti autonóm robot versenyekhez hasonlóan itt is volt egy háttértörténet, mely keretet biztosított a verseny számára. Ebben az évben a háttértörténet az alábbi volt:
„Egy tengeri gáz- és olajipari telephelyet kell megvizsgálni, miután az üzembiztonsági rendszerek üzemzavart jelentettek. Feltételezhető, hogy egy csővezeték szivárogni kezdett, és hamarosan robbanás következhet be. A vészhelyzeti csapatok számára feladat a baleset helyszínének elérése, valamint a szivárgás helyének és nagyságának objektív meghatározása. Ezt követően a robotoknak be kell avatkozniuk a folyamatba a víz alatt egy szelep elzárásával, hogy a szivárgás megállításával megakadályozzák a robbanást.”
A Covid19 járvány közel 3 évig akadályozta ilyen típusú verseny megvalósítását. Idén a szokásokhoz képest kevesebb csapat jelentkezett a versenyre, mert a korábbi nevezők közül sokan még nem tudtak megfelelő embergárdát és működőképes eszközöket összeállítani. A csapatok felkészültségén látszódott, hogy kik foglalkoznak vízalatti robotok irányításával napi szinten. A német csapat és az egyik olasz csapat nagyon komolyan megépített eszközöket hozott a versenyre (értsd pl.: a német csapat a titán dobozba tárolt akkumulátorok segítségével több mint 200 méteres mélységben a Balti-tengeren végez napi szinten több órás bevetéseket). Ezekhez az eszközökhöz a mi általunk kialakított minimális ráfordítással (értsd 4-5 millió forint) kialakított autonóm vízalatti jármű nehezen volt mérhető. A másik olasz csapat egy piacon megvásárolható robottal nevezett a versenyre, mely a használat során sajnos megsérült és szinte használhatatlanná vált.
Felkészülés
Kitűzött és megvalósított feladatok
-
A korábbi évben édesvízhez kifejlesztett autonóm vízalatti robotot alkalmassá kellett tenni a tengeri körülményekhez.
-
Az AUV energiaellátási kapacitását jelentősen meg kellett növelni a hosszabb működési idők támogatásához.
-
Az AUV kapott kamera rendszert, melyből a képi adatokat valós időben a felszíni vezérlőközponthoz kellett juttatni.
-
Az AUV kapott egy víz alatt is működő megfogót (ún.: grippert), mellyel a víz alatt is manipulációkat lehet végrehajtani.
-
Az AUV kapott egy DVL-t, melynek segítségével lehetőség van a pontos vízalatti navigációra.
-
Az AUV kapott egy 360 fokos szonár eszközt, melynek segítségével képes érzékelni a körülötte lévő tárgyakat.
-
Az AUV belső működési biztonságáért felelős szoftver réteget teljesen átírtuk
-
Az AUV biztonsági mágneses indítórendszert kapott, melylehetővé teszi vészhelyzetben az AUV azonnali áramtalanítását.
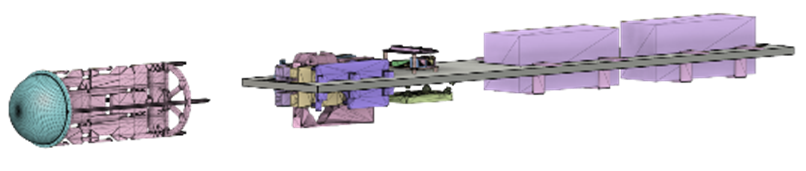
A megvalósított autonóm vízalatti robot (AUV)
A korábbi ERL versenyek tapasztalataiból építkezve terveztük és valósítottuk meg az idei tengeralattjárónkat. Sok új és költséges eszközt kellett ehhez beszerezni, de felhasználtuk a korábbi versenyekre épített megoldásainkat is.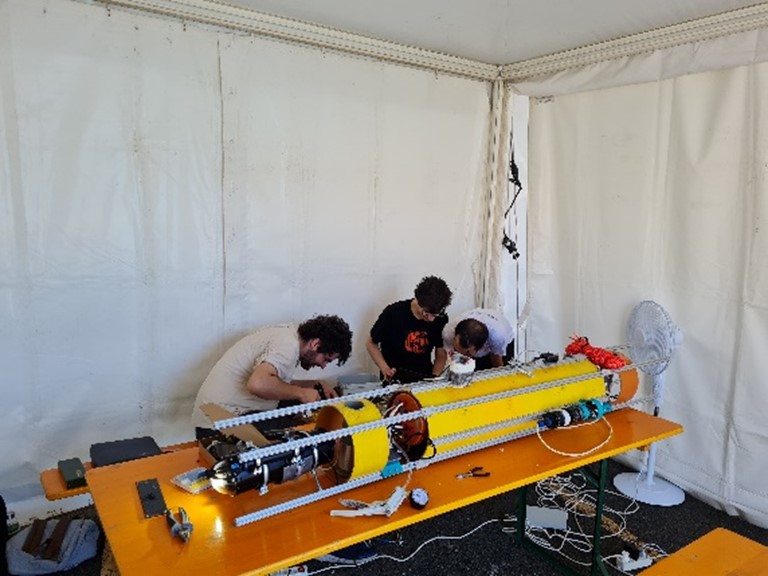
Fotók a versenyről
A versenyt a NATO CMRE (NATO STO Centre for Maritime Research and Experimentation) szponzorálta és a La Spezia kikötő speciálisan ellenőrzött, teljesen elzárt védett kikötőjének területén folyt, emiatt csak igen szigorú szabályok mellett lehetett a verseny területén mozogni, valamint fényképeket készíteni.
 |
 |
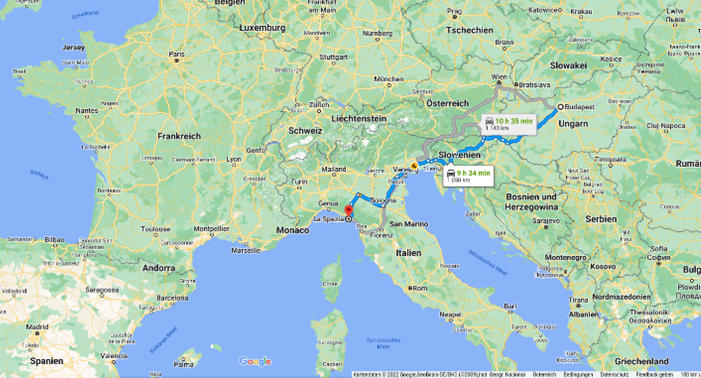
Az utazás
A verseny helyszíne kocsival meglehetősen messze volt Budapesttől. La Spezia egy tengerparti város Olaszországban és közel 10 órás folyamatos autózással lehet csak elérni. A versenyre éjszaka indultunk, ezért szerencsére a komolyabb, híresen hosszú közlekedési dugókat az autópályákon sikerült elkerülnünk. A bepakolás egyébként igen nehézkes és hosszan tartó volt, mivel az érzékenyebb részeket külön-külön kellett szállítanunk.
 |
 |
Visszafelé késő délután indultunk és a fárasztó út után kora hajnalra értünk az egyetemre. A be- és kipakolás az induláshoz képest nagyságrendekkel gyorsabb volt. A csapat láthatólag megedződött a verseny ideje alatt és rutinosan mozgatta az egybeépített robotmodulokat.

Szállás és étkezés
A szállásunkkal nagyon szerencsések voltunk. A szobáink nagyok és kényelmesek voltak és legfőképpen éjszakánként volt lehetőségünk a másnapi versenyre az egyes részegységek szoftver és hardver elemeit „bütykölni”. Az olasz konyha híresen finom, de ezt a szoros felkészülési tempó miatt leginkább a helyi éttermek pizza és fagyi kollekcióinak alapos tesztelésével tudtuk csak igazolni. A mediterrán konyha világa annyira bejött mindenkinek, hogy a csapattagok közül volt aki reggel délben és este is pizzán élt volna…
 |
 |
Életképek a csapatról
A közel egy hét alatt a csapat nagyon összehangolódott. Rengeteget nevettünk és a komoly, sokszor hajnalig tartó fejlesztői sprintek mellett volt időnk bőven egymás ugratására is.
 |
 |
Eredmények
A RAMI 2022 versenyen a csapat különdíjat kapott. Az elismerő oklevél mellé egy a későbbiekben beépíthető víz alatti szonár eszközt is nyertünk. A kapott elismerések mellett ugyanilyen fontos eredmény volt a csapatban dolgozás, és az éles, időkritikus helyzetben szerzett gyakorlati tapasztalatok megszerzése is.
Tervek a jövőre nézve
Közeljövő – 2022 ősz
A következő megmérettetés az ősszel (októberben) megrendezésre kerülő virtuális RAMI 2022 verseny lesz, melynek során virtualizált szimulációs környezetben kell feladatokat teljesíteni az egyes csapatoknak. Ezen a versenyen is szeretne az OUBOT csapat részt venni, és keresünk a csapatba olyan vállalkozó kedvű elsősorban informatikus hallgatókat, akik a robotika, gépi látás, irányítástechnika, navigáció területén szeretnének izgalmas és gyakorlatorientált szoftveres feladatokat megoldani.
A CINTI 2022 konferenciára és a SAMI 2023 konferenciára cikkeket készítünk az általunk fejlesztett AUV különböző hardver és szoftver problémáinak megvalósított megoldásairól.
Távolabbi jövő – 2023 nyár
A következő RAMI verseny várhatólag jövő nyáron kerül megrendezésre Olaszországban. Ez megint valódi autonóm vízalatti tengeralattjáró robotokkal történő versenyzést jelent majd. A jelenlegi rendszerünket szeretnénk ehhez tovább fejleszteni, mind szoftver, mind pedig hardver oldalon. Az elmúlt éveknek megfelelően mindkét versenyen a BSc-s és MSc-s hallgatók a szakmai gyakorlatuk keretén belül is tudnak a felkészülésben segíteni, valamint részt venni.
Köszönetnyilvánítás
Mint minden jó dolognak és eredménynek, ennek is a csapatmunka volt az igazi alapja. Támogatóink nélkül ez a verseny nem lett volna megvalósítható. Az OUBOT csapat tagjai ezúton is köszönik az egyetemi támogatást, valamint az IKUT Alapítvány anyagi támogatását. A csapat köszöni a NATO STO CMRE-nek a felkészülésben és versenyzésben nyújtott sok-sok segítséget. Az egyetemen a felkészülés alatt és az utazások kapcsán is sokszor kellett a hagyományos munkaidőn kívül az épületben tartózkodnunk. Emiatt külön szeretnénk megköszönni az egyetemi portaszolgálat és a karbantartó munkatársak türelmét és folyamatos támogatását is.
| ◀ korábbi verseny: ERL 2017 | korábbi verseny: RAMI 2023 ▶ |